Funded by AFOSR Dynamic Data–Driven Application Systems (DDDAS) · Program Manager Dr. Erik Blasch
In collaboration with Cory Kays & Jeff Chambers (Aurora Flight Sciences), Doug Allaire (TAMU), Laura Mainini (UTRC), Benjamin Peherstorfer (Courant), David Knezevic & Phuong Huynh (Akselos), Victor Singh & Michael Kapteyn (MIT)
Keywords Digital Twin · Digital Thread · Adaptive reduced models · Data-driven reduced models · Self-aware UAV · Dynamic Data–Driven Application Systems (DDDAS)
Relevant publications
Project Overview
We are developing the methods and algorithms that enable (1) on-board dynamic decision-making for an autonomous aerial vehicle, (2) creation of a vehicle Predictive Digital Twin, and (3) illustration of the benefits of Digital Thread. The distinguishing aspect of our approach is that it is both data-driven and physics-based. Our hypothesis is that by leveraging both physics-based knowledge (through physics-based simulation data and physics-based reduced models) and dynamic data (through on-board sensors) we can issue better decisions than if we were to use data alone.
On-board Dynamic Decision-making
So far, we have shown the advantage of our on-board dynamic decision-making methods through our simulation-based studies. In the coming year, we will be testing our approaches on our DDDAS flight test vehicle, in flight tests at Fort Devens.
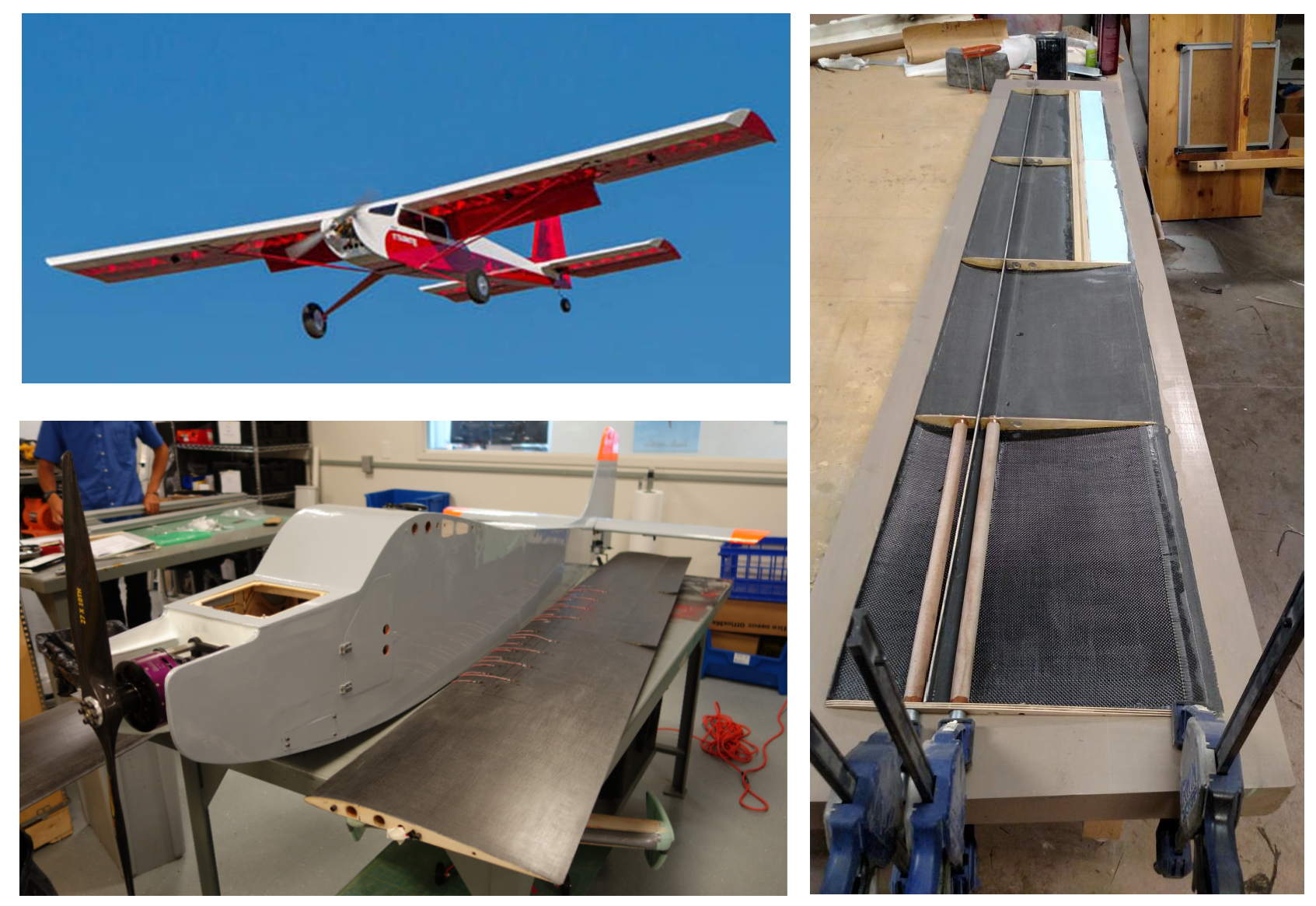
Flight Test Vehicle
We have built a 12-foot wingspan modular flight test vehicle with interchangeable wings. Our flight tests will collect data with a pristine set of wings and with several sets of damaged wings, each with differing damage location and severity. Offline, we build physics-based models of the pristine vehicle using finite element structural models, vortex lattice aerodynamic models, and other models of key aircraft systems. We run simulations of different damage scenarios using these models and create reduced-order models and damage libraries. Then online (in flight), we will acquire sensor data, perform a classification task, and then rapidly access the appropriate pre-computed reduced models and damage libraries. The sensor data will also be used to update the reduced-order models in the face of changing conditions.
Digital Twin
We are creating a Predictive Digital Twin of our flight-test vehicle, using a combination of physics-based and empirical models that represent the key aspects of the vehicle’s performance. A core part of this Digital Twin is a component-based reduced-order model of the aircraft structure.
Towards a Self-Aware UAV
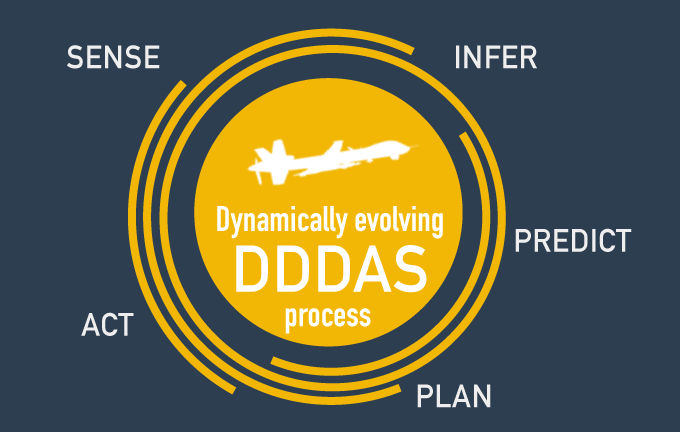
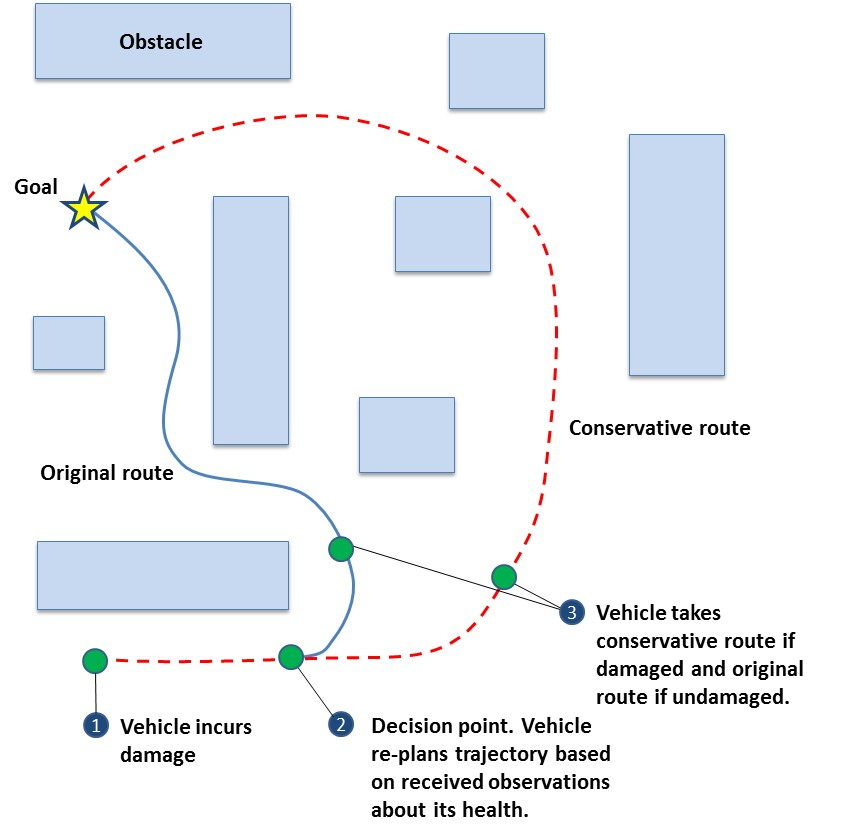
Our research is in support of a self-aware aerospace vehicle — a vehicle that can dynamically adapt the way it performs missions by gathering information about itself and its surroundings and responding intelligently. We consider the specific challenge of an unmanned aerial vehicle that can dynamically and autonomously sense its structural state and re-plan its mission according to its estimated current structural health.
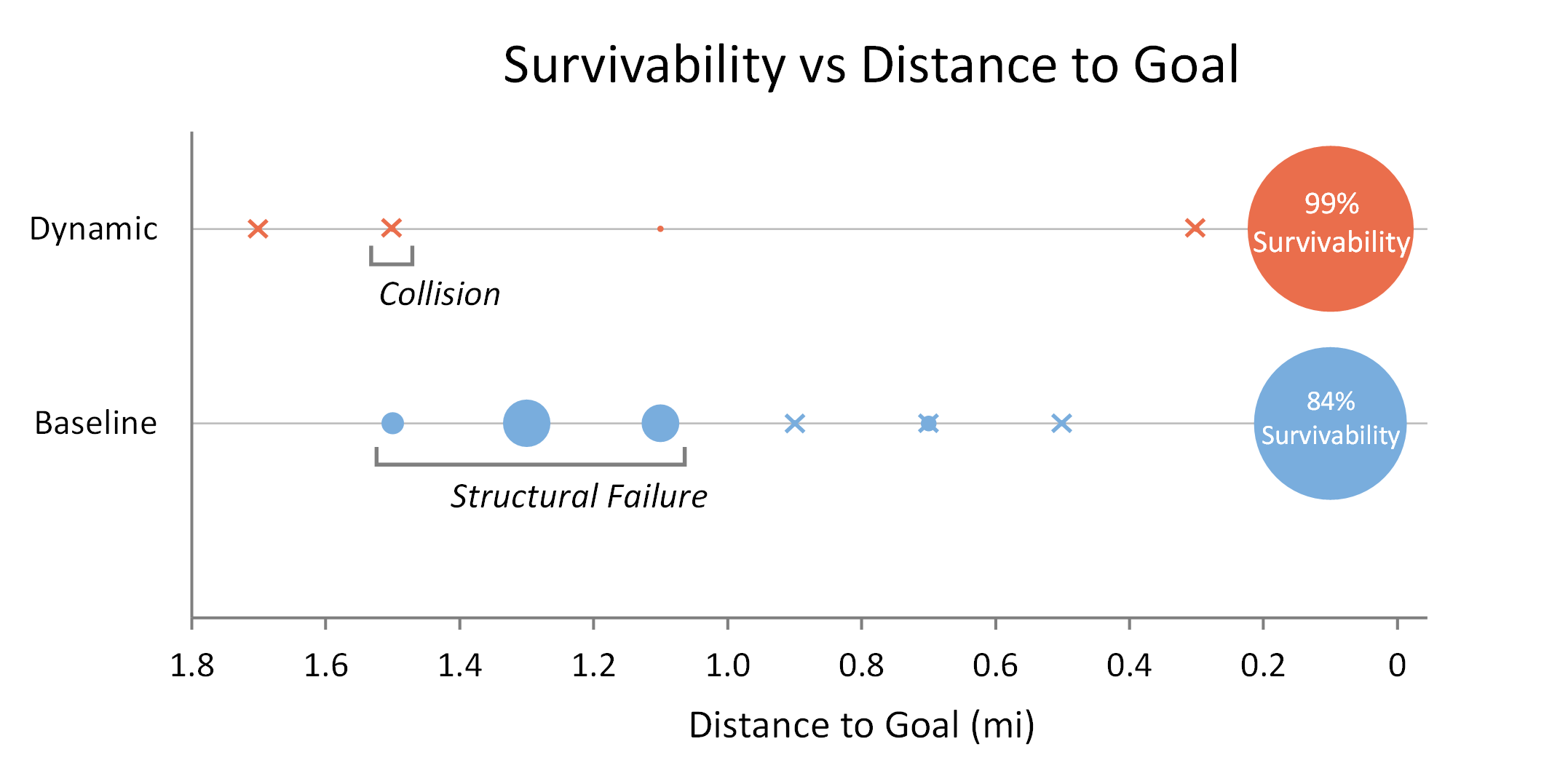
We show that this self-awareness can lead to significant benefits. For example, in our simulations of a structurally damaged UAV navigating a complex environment, the self-aware vehicle had an increased survivability of 99% compared to a baseline vehicle's 84%.
Data-driven reduced-order models are a key enabler.
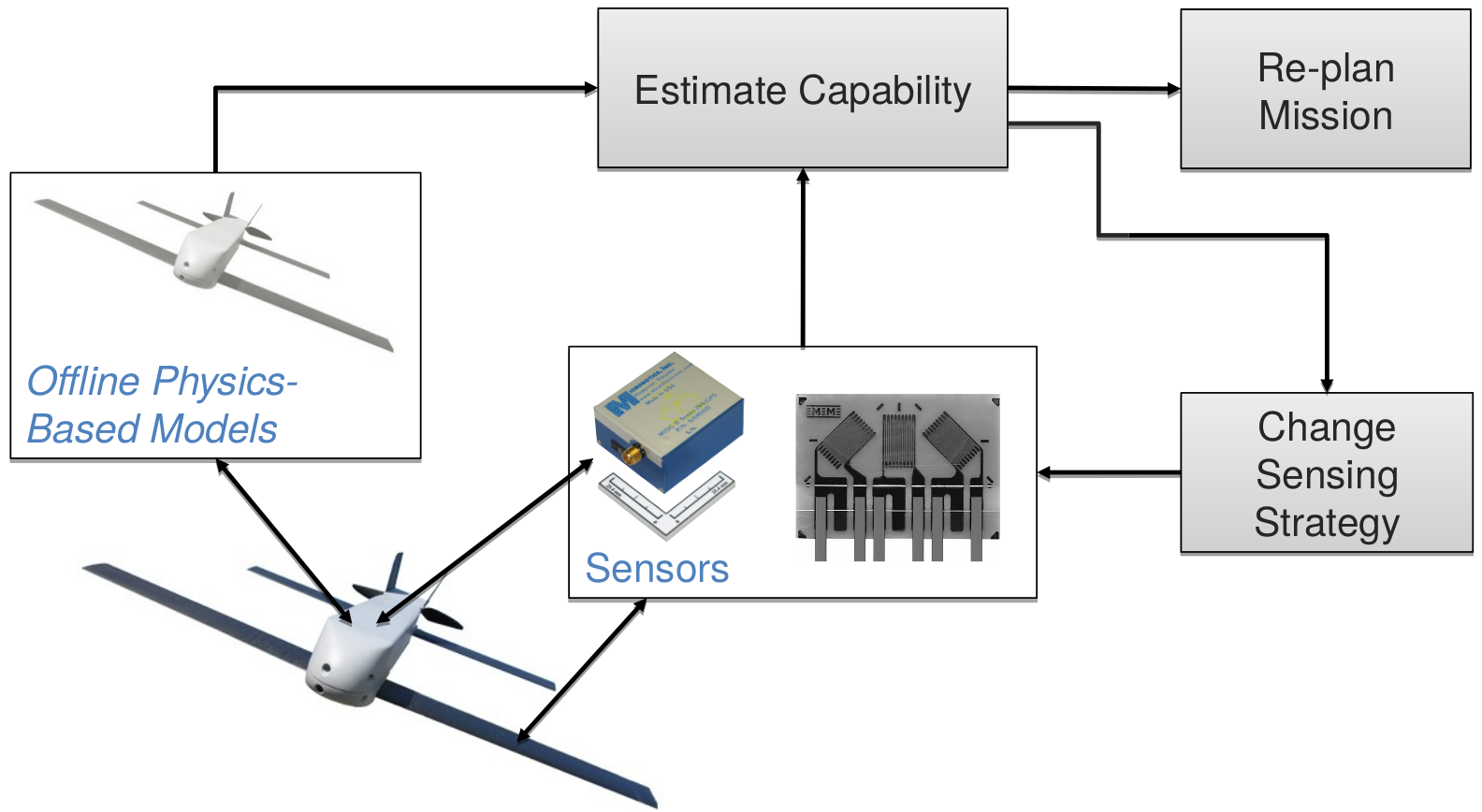
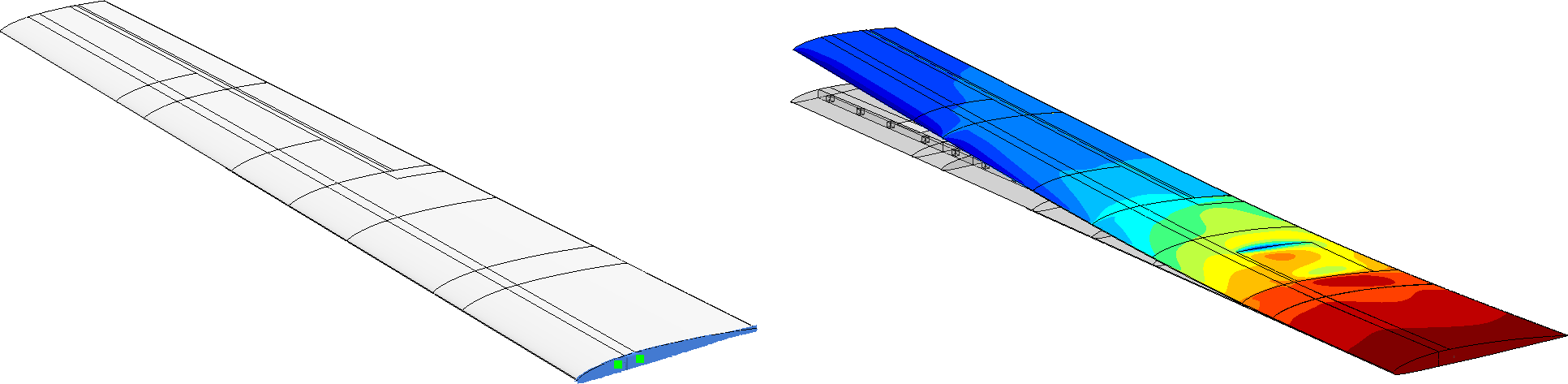
The challenge is to achieve the tasks of sense-infer-predict-act in real time — executing online models and exploiting dynamic data streams — while also accounting for uncertainty. Our approach combines information from physics-based models together with dynamic sensor data in order to estimate current flight capability. Our physics-based models analyze the system at both the local panel level and the global vehicle level. The models are simulated offline to build a scenario library and to create reduced models. During flight, we gather dynamic sensor data; we rapidly adapt and solve the reduced models; and we use the results to identify dynamic data-driven decisions to control the UAV's behavior.
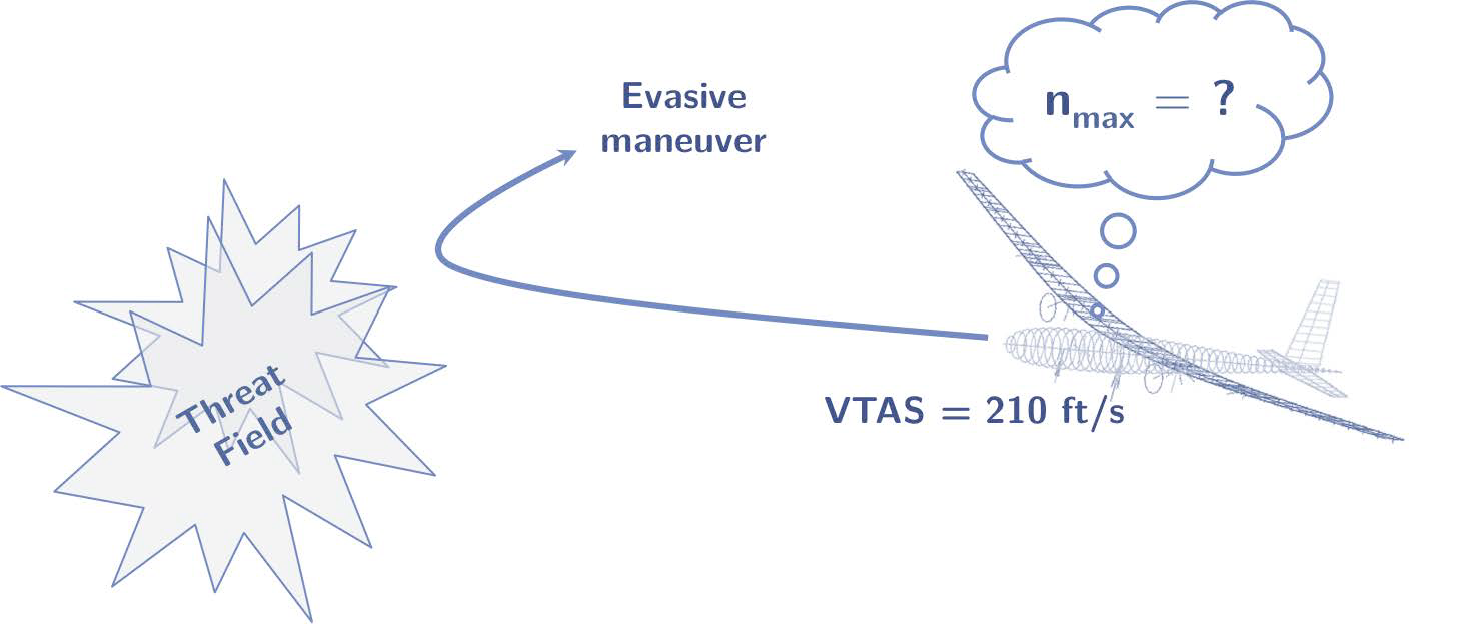
We have developed a data-driven approach for the reduced models and online updating of the flight envelope of a self-aware UAV subjected to structural degradation. We demonstrated the methodology on simulations of a UAV executing a pull-up maneuver, in which the vehicle flight envelope is updated dynamically with onboard sensor information. During vehicle operation, the maximum maneuvering load factor is estimated using structural strain sensor measurements combined with physics-based information from precomputed damage scenarios that consider structural weakness. Compared to a baseline case that uses a static as-designed flight envelope, the self-aware UAV achieves both an increase in probability of executing a successful maneuver and an increase in overall usage of the vehicle capability.
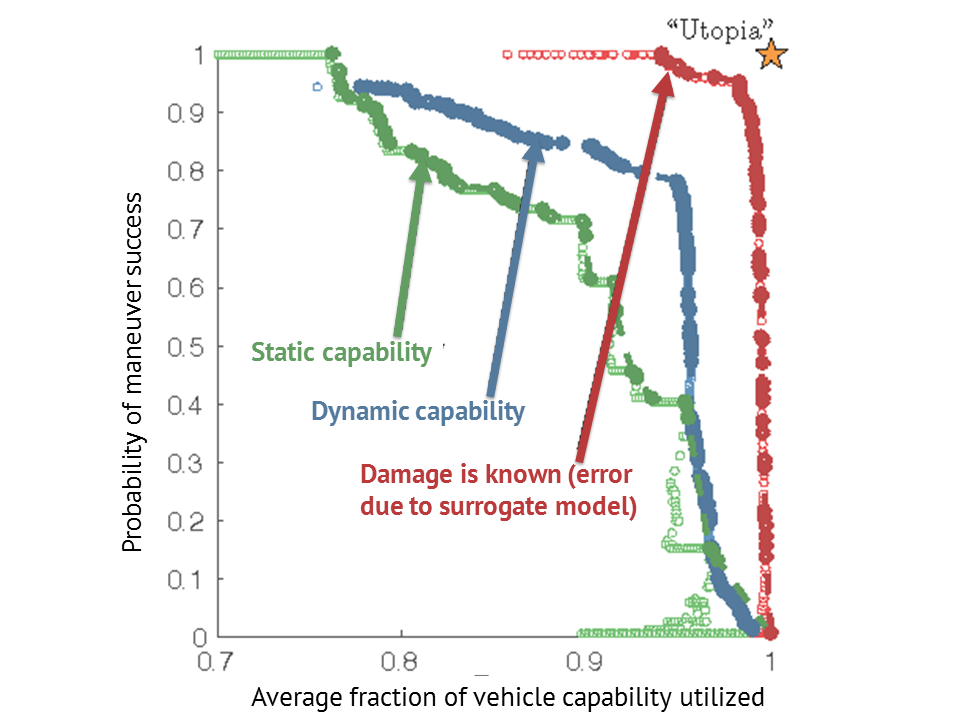
Our dynamic data-driven flight envelope lets the self-aware UAV use more of its capability while increasing the probability of executing a successful pull-up maneuver.
Dynamic assessment of structural health enables adaptive mission replanning.
We have also shown how this dynamic data-driven flight capability estimation can be used for path planning for a self-aware UAV. We have formulated a general mathematical approach that leverages offline vehicle analysis and design data together with onboard sensor measurements to achieve dynamic path planning. The
mathematical framework, expressed as a Constrained Partially Observable Markov Decision
Process, accounts for vehicle capability constraints and is robust to modeling error and
disturbances in both the vehicle process and measurement models. Sensor measurements are treated in a general manner and can include combinations of multiple modalities such as GPS/IMU data as well as structural strain data of the airframe. The result is that the vehicle can dynamically adjust its trajectory according to the observations it receives about its current state of health, thereby retaining a high probability of survival and mission success.
Kapteyn, M., Knezevic, D. and Willcox, K. In proceedings of 2020 AIAA Scitech Forum & Exhibition, Orlando, FL, January 2020.
This work develops a methodology for creating and updating data-driven physics-based digital twins, and demonstrates the approach through the development of a structural digital twin for a 12ft wingspan unmanned aerial vehicle. The digital twin is built from a library of component-based reduced-order models that are derived from high-fidelity finite element simulations of the vehicle in a range of pristine and damaged states. In contrast with traditional monolithic techniques for model reduction, the component-based approach scales efficiently to large complex systems, and provides a flexible and expressive framework for rapid model adaptation—both critical features in the digital twin context. The digital twin is deployed and updated using interpretable machine learning. Specifically, we use optimal trees—a recently developed scalable machine learning method—to train an interpretable data-driven classifier. In operation, the classifier takes as input vehicle sensor data, and then infers which physics-based reduced models in the model library are the best candidates to compose an updated digital twin. In our example use case, the data-driven digital twin enables the aircraft to dynamically replan a safe mission in response to structural damage or degradation.
Singh, V. and Willcox, K. AIAA Journal, Vol. 56, No. 11, pp. 4515-4528, 2018.
Digital Thread is a data-driven architecture that links together information generated from across the product lifecycle. A specific opportunity is to leverage Digital Thread to more efficiently design the next generation of products. This task is a data-driven design and decision problem under uncertainty. This paper explores this problem through three objectives: 1) Provide a mathematical definition of Digital Thread in the context of a specific engineering design problem. 2) Establish the feedback coupling of how information from Digital Thread enters the design problem. 3) Develop a data-driven design methodology that incorporates information from Digital Thread into the next generation of product designs. The methodology is illustrated through an example design of a structural fiber steered composite component.
Swischuk, R., Mainini, L., Peherstorfer, B. and Willcox, K., Computers and Fluids, to appear, 2019.
This paper considers the creation of parametric surrogate models for applications in science and engineering where the goal is to predict high-dimensional output quantities of interest, such as pressure, temperature and strain fields. The proposed methodology develops a low-dimensional parametrization of these quantities of interest using the proper orthogonal decomposition (POD), and combines this parametrization with machine learning methods to learn the map between the input parameters and the POD expansion coefficients. The use of particular solutions in the POD expansion provides a way to embed physical constraints, such as boundary conditions and other features of the solution that must be preserved. The relative costs and effectiveness of four different machine learning techniques—neural networks, multivariate polynomial regression, k-nearest-neighbors and decision trees—are explored through two engineering examples. The first example considers prediction of the pressure field around an airfoil, while the second considers prediction of the strain field over a damaged composite panel. The case studies demonstrate the importance of embedding physical constraints within learned models, and also highlight the important point that the amount of model training data available in an engineering setting is often much less than it is in other machine learning applications, making it essential to incorporate knowledge from physical models.
Singh, V. and Willcox, K., AIAA Journal, Vol. 55, No. 8, pp. 2727-2738, 2017.
This paper presents methodology to enable path planning for an unmanned aerial vehicle that uses dynamic data-driven flight capability estimation. The main contribution of the work is a general mathematical approach that leverages offline high-fidelity physics-based modeling together with onboard sensor measurements to achieve dynamic path planning. The mathematical framework, expressed as a constrained partially observable Markov decision process, accounts for vehicle capability constraints and is robust to modeling error and disturbances in both the vehicle process and measurement models. Vehicle capability constraints are incorporated using probabilistic support vector machine surrogates of high-fidelity physics-based models that adequately capture the richness of the vehicle dynamics. Sensor measurements are treated in a general manner and can include combinations of multiple modalities such as that through global positioning system signals, inertial mass unit outputs, and structural strain data of the airframe. Results are presented for a simulated three-dimensional environment and point-mass airplane model. The vehicle can dynamically adjust its trajectory according to the observations it receives about its current state of health, thereby retaining a high probability of survival and mission success.
Mainini, L. and Willcox, K. Computers and Structures, Vol. 182, pp. 296-312, 2017.
This paper proposes a data-to-decisions framework - a methodology and a computational strategy - to assist real-time decisions associated with structural monitoring and informed by incomplete, noisy measurements. The data-to-decision structural assessment problem is described in terms of sensor data measurements (such as strain components) and system capabilities (such as failure indices). A MultiStep Reduced-Order Modeling (MultiStep-ROM) strategy tackles the time-critical problem of estimating capabilities from measured data. The methodology relies on an offline-online decomposition of tasks, and combines reduced-order modeling, surrogate modeling, and clustering techniques. The performance of the approach is studied for the case of uncertain measurements arising from spatially distributed sensors over a wing panel. Both sensor noise and sensor spatial sparsity affect the quality of the information available online. The discussion is supported by three investigations that explore the efficiency of the online procedure for multiple combinations of quantity and quality of sensed data. The method is demonstrated for an unmanned aerial vehicle composite wing panel undergoing local degradation of its structural properties.
Mainini, L. and Willcox, K. AIAA Journal, Vol. 53, No. 6, pp. 1612-1626, 2015.
This paper proposes a data-driven strategy to assist online rapid decision making for an unmanned aerial vehicle that uses sensed data to estimate its structural state, uses this estimate to update its corresponding flight capabilities, and then dynamically replans its mission accordingly. The approach comprises offline and online computational phases constructed to address the sense–plan–act information flow while avoiding a costly online inference step. During the offline phase, high-fidelity finite element simulations are used to construct reduced-order models and classification criteria: proper orthogonal decomposition approximations and self-organizing maps are combined to realize a fast mapping from measured quantities to system capabilities. During the online phase, the surrogate mapping is employed to directly estimate the vehicle’s evolving structural capability from sensor data. The approach is demonstrated for a test problem of a composite wing panel on an unmanned aerial vehicle that undergoes degradation in structural properties.
Peherstorfer, B. and Willcox, K., SIAM Journal on Scientific Computing, Vol. 37, No. 4, pp. A2123-A2150, 2015.
This work presents a nonlinear model reduction approach for systems of equations stemming from the discretization of partial differential equations with nonlinear terms. Our approach constructs a reduced system with proper orthogonal decomposition and the discrete empirical interpolation method (DEIM); however, whereas classical DEIM derives a linear approximation of the nonlinear terms in a static DEIM space generated in an offline phase, our method adapts the DEIM space as the online calculation proceeds and thus provides a nonlinear approximation. The online adaptation uses new data to produce a reduced system that accurately approximates behavior not anticipated in the offline phase. These online data are obtained by querying the full-order system during the online phase, but only at a few selected components to guarantee a computationally efficient adaptation. Compared to the classical static approach, our online adaptive and nonlinear model reduction approach achieves accuracy improvements of up to three orders of magnitude in our numerical experiments with time-dependent and steady-state nonlinear problems. The examples also demonstrate that through adaptivity, our reduced systems provide valid approximations of the full-order systems outside of the parameter domains for which they were initially built in the offline phase.
Peherstorfer, B. and Willcox, K. Computer Methods in Applied Mechanics and Engineering, Vol. 291, pp. 21-41, 2015.
Data-driven model reduction constructs reduced-order models of large-scale systems by learning the system response characteristics from data. Existing methods build the reduced-order models in a computationally expensive offline phase and then use them in an online phase to provide fast predictions of the system. In cases where the underlying system properties are not static but undergo dynamic changes, repeating the offline phase after each system change to rebuild the reduced-order model from scratch forfeits the savings gained in the online phase. This paper proposes dynamic reduced-order models that break with this classical but rigid approach. Dynamic reduced-order models exploit the opportunity presented by dynamic sensor data and adaptively incorporate sensor data during the online phase. This permits online adaptation to system changes while circumventing the expensive rebuilding of the model. A computationally cheap adaptation is achieved by constructing low-rank updates to the reduced operators. With these updates and with sufficient and accurate data, our approach recovers the same model that would be obtained by rebuilding from scratch. We demonstrate dynamic reduced-order models on a structural assessment example in the context of real-time decision making. We consider a plate in bending where the dynamic reduced-order model quickly adapts to changes in structural properties and achieves speedups of four orders of magnitude compared to rebuilding a model from scratch.
Peherstorfer, B. and Willcox, K. Procedia Computer Science, Vol. 51, pp. 2553-2562, 2015.
We consider the task of dynamic capability estimation for an unmanned aerial vehicle, which is needed to provide the vehicle with the ability to dynamically and autonomously sense, plan, and act in real time. Our dynamic data-driven application systems framework employs reduced models to achieve rapid evaluation runtimes. Our reduced models must also adapt to underlying dynamic system changes, such as changes due to structural damage or degradation of the system. Our dynamic reduced models take into account changes in the underlying system by directly learning from the data provided by sensors, without requiring access to the original high-fidelity model. We present here an adaptivity indicator that detects a change in the underlying system and so allows the initiation of the dynamic reduced modeling adaptation if necessary. The adaptivity indicator monitors the error of the dynamic reduced model by comparing model predictions with sensor data, and signals a change if the error exceeds a given threshold. The indicator is demonstrated on a deflection model of a damaged plate in bending. Local damage of the plate is modeled by a change in the thickness of the plate. The numerical results show that in this example the adaptivity indicator detects all changes in the thickness and correctly initiates the adaptation of the reduced model.
Lecerf, M., Allaire, D. and Willcox, K. AIAA Journal , Vol. 53, No. 10, pp. 3073-3087, October 2015. (An earlier version of this work appeared in AIAA Paper 2014-1175, January 2014.)
This paper presents a data-driven approach for the online updating of the flight envelope of an unmanned aerial vehicle subjected to structural degradation. The main contribution of the work is a general methodology that leverages both physics-based modeling and data to decompose tasks into two phases: expensive offline simulations to build an efficient characterization of the problem and rapid data-driven classification to support online decision making. In the approach, physics-based models at the wing and vehicle level run offline to generate libraries of information covering a range of damage scenarios. These libraries are queried online to estimate vehicle capability states. The state estimation and associated quantification of uncertainty are achieved by Bayesian classification using sensed strain data. The methodology is demonstrated on a conceptual unmanned aerial vehicle executing a pullup maneuver, in which the vehicle flight envelope is updated dynamically with onboard sensor information. During vehicle operation, the maximum maneuvering load factor is estimated using structural strain sensor measurements combined with physics-based information from precomputed damage scenarios that consider structural weakness. Compared to a baseline case that uses a static as-designed flight envelope, the self-aware vehicle achieves both an increase in probability of executing a successful maneuver and an increase in overall usage of the vehicle capability.