Funded by AFOSR Dynamic Data–Driven Application Systems (DDDAS) · Program Officer Dr. Erik Blasch · MIT-SUTD International Design Centre · The Boeing Company · AFOSR Computational Mathematics · Program Officer Dr. Fariba Fahroo
In collaboration with Cory Kays & team (Aurora Flight Sciences), David Knezevic & Phuong Huynh (Akselos), Michael Kapteyn (MIT PhD student), Jacob Pretorius (Jessara Group)
Keywords Predictive Digital Twin · Scientific machine learning · Adaptive reduced models · Data-driven reduced models · Self-aware UAV · Component-based reduced models · Dynamic Data–Driven Application Systems (DDDAS)
Relevant publications
Project Overview
A digital twin is a set of coupled computational models that evolve over time to persistently represent the structure, behavior, and context of a unique physical asset.
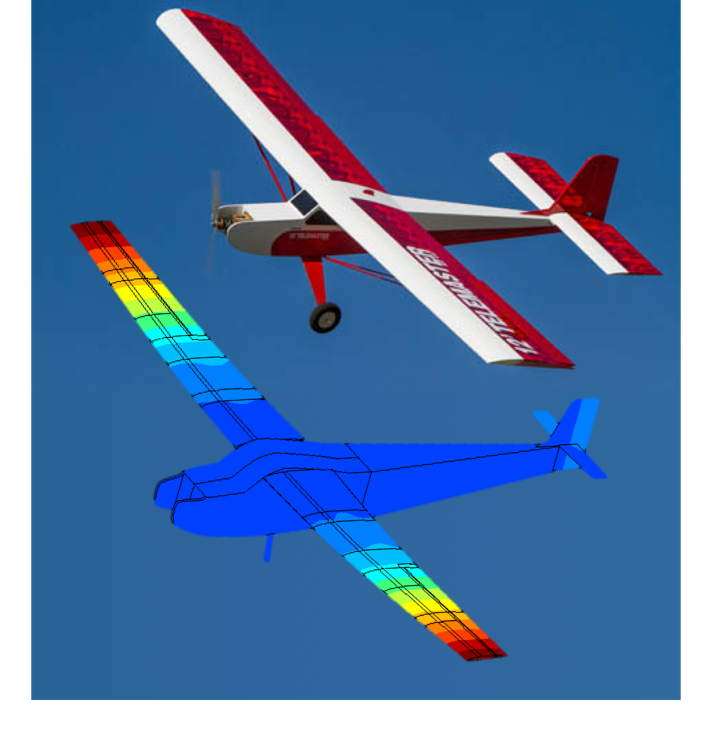
We are developing the methods and algorithms that enable creation of a Predictive Digital Twin. Our physical asset is a custom-built 12ft wingspan unmanned aerial vehicle (UAV).
We build a structural Digital Twin of the UAV that we use to monitor vehicle structural health and drive dynamic flight planning decisions.
Our Predictive Digital Twin combines scientific machine learning with predictive physics-based models. Component-based reduced-order modeling makes the approach computationally efficient and scalable.
A Mathematical and Computational Foundation for Predictive Digital Twins
Current state-of-the-art digital twins are largely the result of custom implementations that require considerable deployment resources and a high level of expertise.
We have proposed a unifying mathematical foundation for digital twins, with the goal of moving from the one-off digital twin to accessible and robust digital twin implementations at scale.
Specifically, we define the combined asset-twin system in terms of six key quantities, which are shown in the figure below.
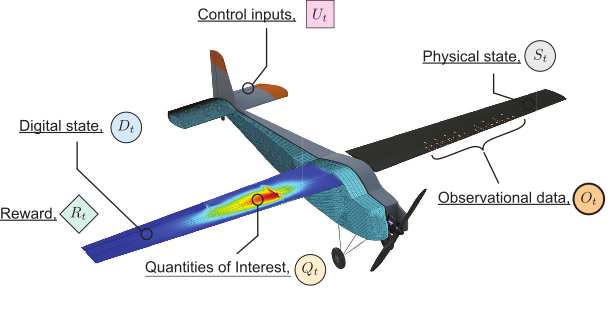
Defining the system in this way enables us to model the evolution of the physical asset and its digital twin over time. The digital twin learns about the state of the physical asset by assimilating incoming observational data. This information is used to update the internal digital twin models, which are then evaluated to provide accurate analysis and predictions. This enables the digital twin to positively influence the physical asset by informing and/or issuing intelligent control inputs. We model this two-way coupled system using the probabilistic graphical model below, which illustrates the dependencies between quantities in the system as it evolves over time.
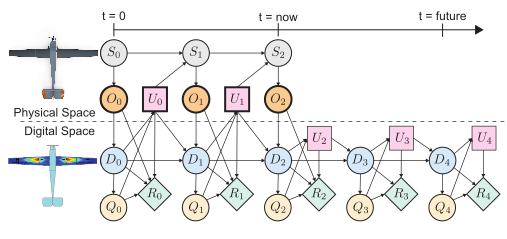
Graphical models are a powerful tool for probabilistic representation, inference, and learning, and have been successfully applied in applications ranging from robotics and computer vision, to speech recognition and medical diagnosis. Our proposed probabilistic graphical model serves as a foundation for defining and modeling a digital twin, as well as deriving computationally efficient algorithms for model updating, prediction, and optimal control. More information about the proposed probabilistic graphical model formulation, as well as a demonstration of how we have used the model to perform principled and scalable experimental calibration of a UAV digital twin, can be found in our research paper.
Digital Twin component-based library
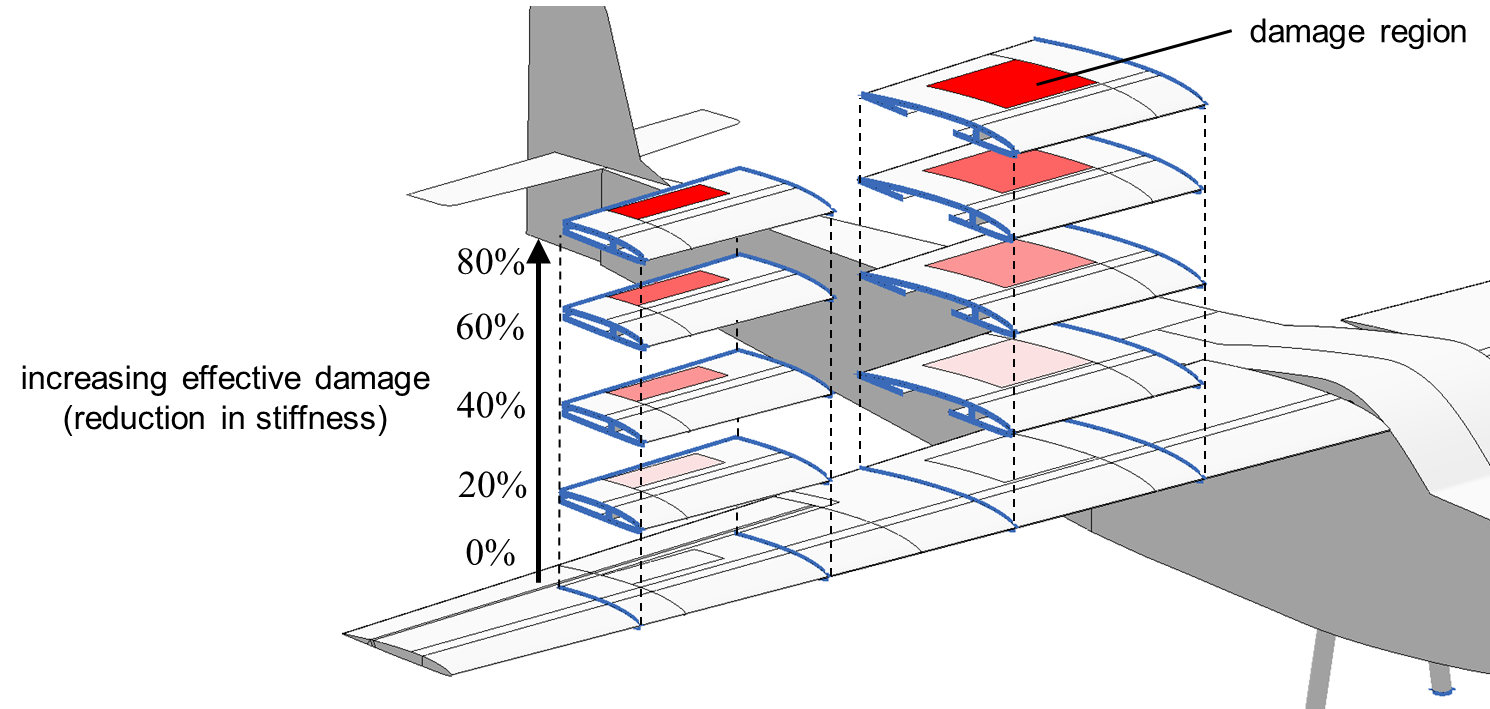
At the heart of our digital twin is a library of physics-based models, each representing a different structural state. We use a component-based reduced-order modeling approach, so that these physics-based models are accurate and fast to evaluate, even at the scale of the full UAV structure.
We model different damage states by creating multiple versions of each component in the model. Each version has a different damage state. In this example we create five copies of two components in the right wing of the UAV. Each copy has a reduction in stiffness of between 0% (pristine case) and 80% (worst damage case).
In flight, we use onboard structural sensor data to estimate which model best matches the current state of the UAV, and use this model in the digital twin. This ensures that the digital twin is constantly updated to reflect the current state of the UAV.
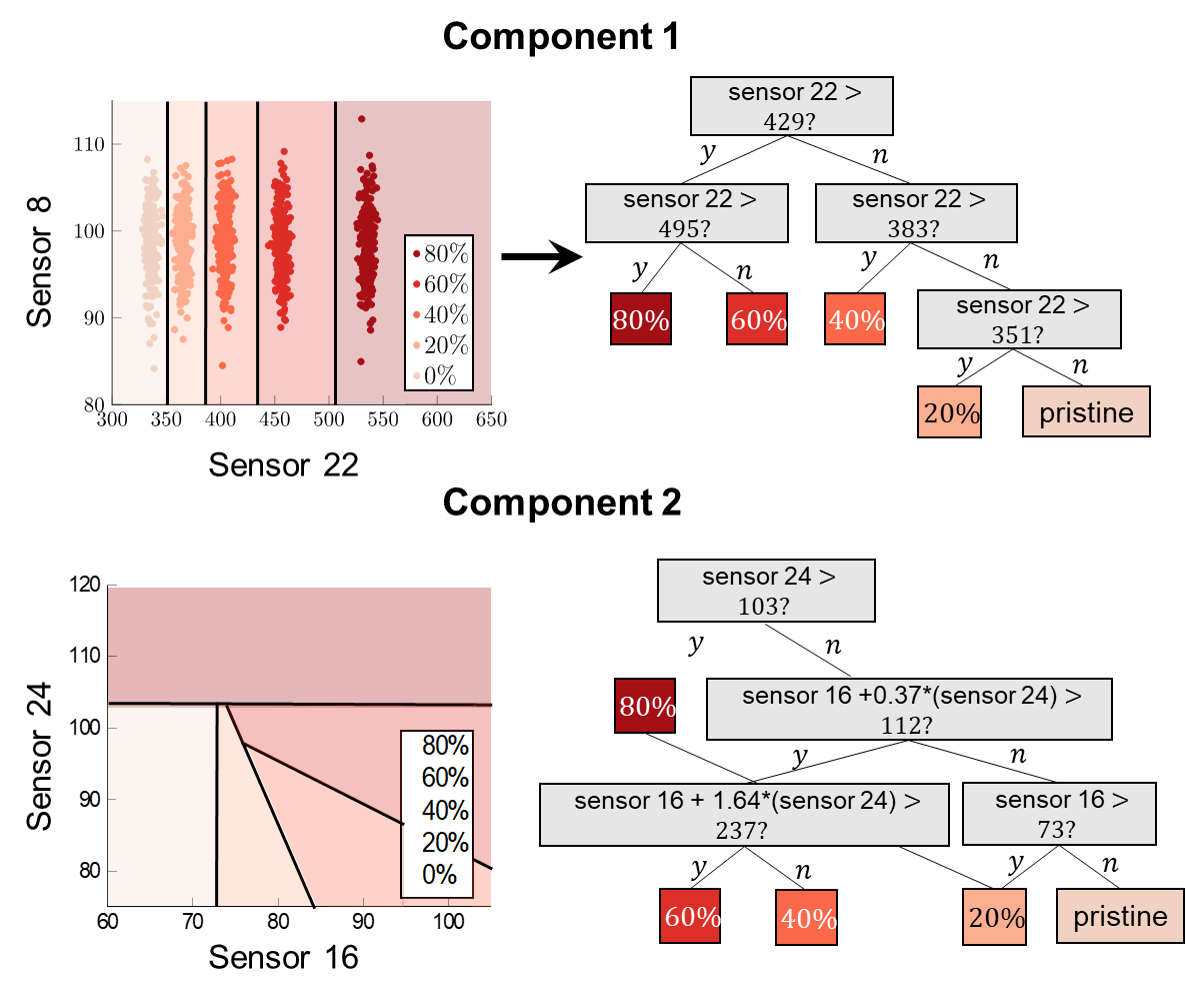
Interpretable machine learning
We use interpretable machine learning to train an optimal classification tree that predicts which model from the library best matches a set of structural measurements. These trees partition the space of sensor measurements so that each resulting region corresponds to a particular damage state. When a new sensor measurement is acquired, we use the classification tree to decide which damage state best matches the data. The classification tree is interpretable because explicitly characterizes decision boundaries and it naturally enables sparse sensing.
Hardware Platform
Although the methods we develop can be applied to a wide range of physical assets, our testbed for this research is a custom-built 12ft wingspan fixed-wing UAV, developed in collaboration with Aurora Flight Sciences. This UAV is outfitted with a suite of structural sensors such as strain gauges, accelerometers, and high frequency vibration sensors.


Dynamic decision making
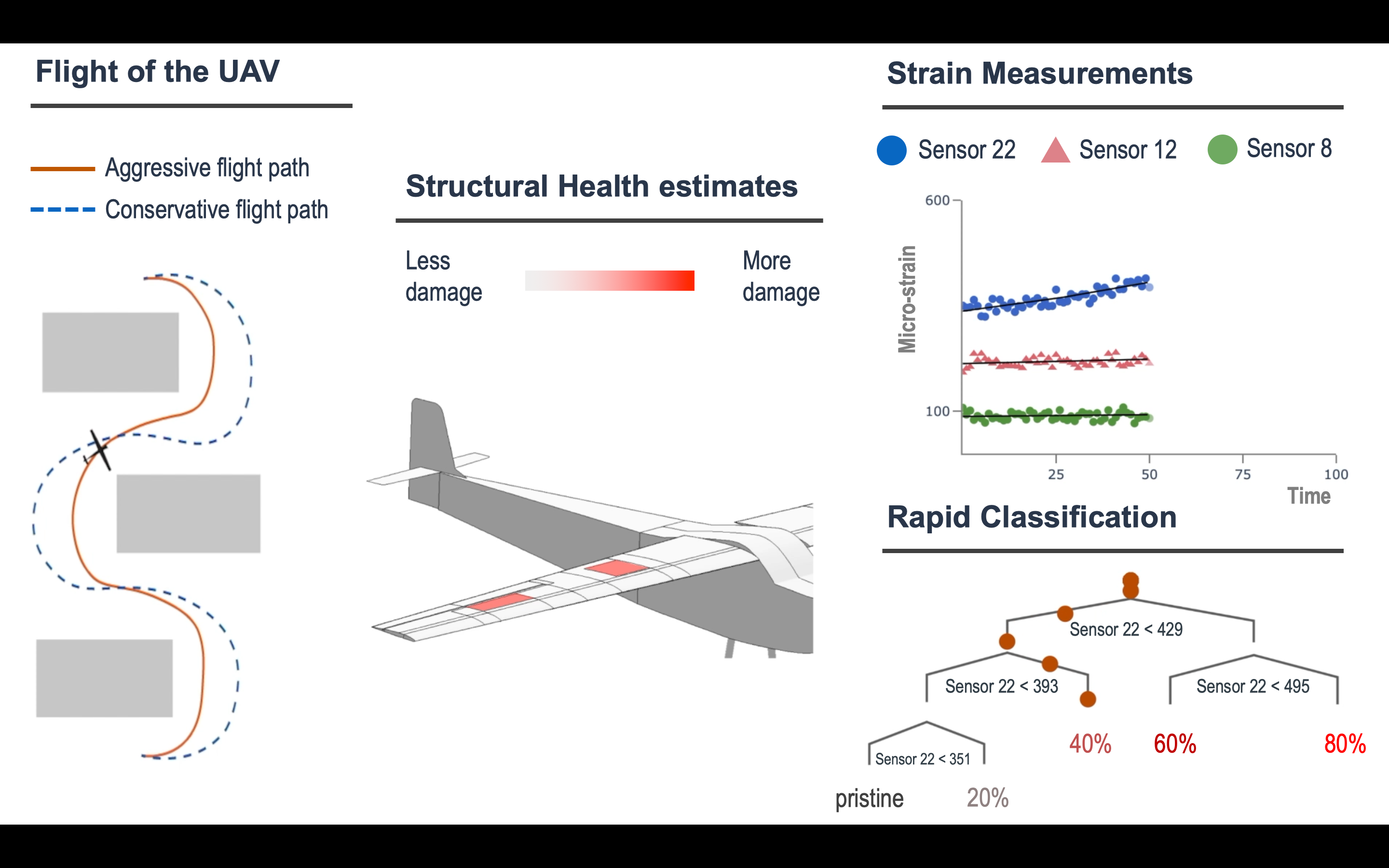
We demonstrate the benefits of our approach on an illustrative UAV scenario. In this scenario, the UAV must fly safely through a set of obstacles to a goal location. The UAV undergoes a damage event and then continues to accumulate structural degradation. The UAV must choose either an aggressive flight path or a more conservative path around each obstacle. The aggressive path is faster, but requires the UAV to make sharp turns that subject the UAV to high structural loads. The more conservative route is slower, but subjects the UAV to lower structural loads. In pristine condition, the aircraft structure can safely withstand the higher loading, but as the aircraft wing structure accumulates damage, the high load may lead to structural failure.
As shown in the movie above, our self-aware UAV uses the rapidly updating digital twin to monitor its evolving structural state and dynamically estimate its flight capability. Based on these capability estimates the UAV is able to dynamically replan the mission in order to maximize speed while avoiding structural failure.
Chaudhuri, A., Pash, G., Hormuth, D., Lorenzo, G., Kapteyn, M., Wu, C., Lima, E., Yankeelov, Y. and Willcox K. Frontiers in Artificial Intelligence, Special Issue on Digital Twins in Oncology, Vol. 6, October 2023, 1222612.
We develop a methodology to create data-driven predictive digital twins for optimal risk-aware clinical decision-making. We illustrate the methodology as an enabler for an anticipatory personalized treatment that accounts for uncertainties in the underlying tumor biology in high-grade gliomas, where heterogeneity in the response to standard-of-care (SOC) radiotherapy contributes to sub-optimal patient outcomes. The digital twin is initialized through prior distributions derived from population-level clinical data in the literature for a mechanistic model’s parameters. Then the digital twin is personalized using Bayesian model calibration for assimilating patient-specific magnetic resonance imaging data. The calibrated digital twin is used to propose optimal radiotherapy treatment regimens by solving a multi-objective risk-based optimization under uncertainty problem. The solution leads to a suite of patient-specific optimal radiotherapy treatment regimens exhibiting varying levels of trade-off between the two competing clinical objectives: (i) maximizing tumor control (characterized by minimizing the risk of tumor volume growth) and (ii) minimizing the toxicity from radiotherapy. The proposed digital twin framework is illustrated by generating an in silico cohort of 100 patients with high-grade glioma growth and response properties typically observed in the literature. For the same total radiation dose as the SOC, the personalized treatment regimens lead to median increase in tumor time to progression of around six days. Alternatively, for the same level of tumor control as the SOC, the digital twin provides optimal treatment options that lead to a median reduction in radiation dose by 16.7% (10 Gy) compared to SOC total dose of 60 Gy. The range of optimal solutions also provide options with increased doses for patients with aggressive cancer, where SOC does not lead to sufficient tumor control.
Torzoni, M., Tezzele, M., Mariani, S., Manzoni, A. and Willcox K. Computer Methods in Applied Mechanics and Engineering, Vol. 418, 2024, 116584.
The digital twin concept represents an appealing opportunity to advance condition-based and predictive maintenance paradigms for civil engineering systems, thus allowing reduced lifecycle costs, increased system safety, and increased system availability. This work proposes a predictive digital twin approach to the health monitoring, maintenance, and management planning of civil engineering structures. The asset-twin coupled dynamical system is encoded employing a probabilistic graphical model, which allows all relevant sources of uncertainty to be taken into account. In particular, the time-repeating observations-to-decisions flow is modeled using a dynamic Bayesian network. Real-time structural health diagnostics are provided by assimilating sensed data with deep learning models. The digital twin state is continually updated in a sequential Bayesian inference fashion. This is then exploited to inform the optimal planning of maintenance and management actions within a dynamic decision-making framework. A preliminary offline phase involves the population of training datasets through a reduced-order numerical model and the computation of a health-dependent control policy. The strategy is assessed on two synthetic case studies, involving a cantilever beam and a railway bridge, demonstrating the dynamic decision-making capabilities of health-aware digital twins.
Kapteyn, M., Pretorius, J. and Willcox, K. Nature Computational Science, Vol. 1, No. 5, May 2021, pp. 337-347.
A unifying mathematical formulation is needed to move from one-off digital twins built through custom implementations to robust digital twin implementations at scale. This work proposes a probabilistic graphical model as a formal mathematical representation of a digital twin and its associated physical asset. We create an abstraction of the asset-twin system as a set of coupled dynamical systems, evolving over time through their respective state-spaces and interacting via observed data and control inputs. The formal definition of this coupled system as a probabilistic graphical model enables us to draw upon well-established theory and methods from Bayesian statistics, dynamical systems, and control theory. The declarative and general nature of the proposed digital twin model make it rigorous yet flexible, enabling its application at scale in a diverse range of application areas. We demonstrate how the model is instantiated as a Bayesian network to create a structural digital twin of an unmanned aerial vehicle. The graphical model foundation ensures that the digital twin creation and updating process is principled, repeatable, and able to scale to the calibration of an entire fleet of digital twins.
Niederer, S., Sacks, M., Girolami, M. and Willcox, K. Nature Computational Science, Vol. 1, No. 5, May 2021, pp. 313-320.
Mathematical modeling and simulation are moving from being powerful development and analysis tools towards having increased roles in operational monitoring, control and decision support, in which models of specific entities are continually updated in the form of a digital twin. However, current digital twins are largely the result of bespoke technical solutions that are difficult to scale. We discuss two exemplar applications that motivate challenges and opportunities for scaling digital twins, and that underscore potential barriers to wider adoption of this technology.
Kapteyn, M., Knezevic, D., Huynh, D.B.P., Tran, Minh and Willcox, K. International Journal for Numerical Methods in Engineering, 2020, https://doi.org/10.1002/nme.6423.
This work proposes an approach that combines a library of component-based reduced-order models with Bayesian state estimation in order to create data-driven physics-based digital twins. Reduced-order modeling produces physics-based computational models that are reliable enough for predictive digital twins, while still being fast to evaluate. In contrast with traditional monolithic techniques for model reduction, the component-based approach scales efficiently to large complex systems, and provides a flexible and expressive framework for rapid model adaptation---both critical features in the digital twin context. Data-driven model adaptation and uncertainty quantification is formulated as a Bayesian state estimation problem, in which sensor data is used to infer which models in the model library are the best candidates for the digital twin. This approach is demonstrated through the development of a digital twin for a 12ft wingspan unmanned aerial vehicle. Offline, we construct a library of pristine and damaged aircraft components. Online, we use structural sensor data to rapidly adapt a physics-based digital twin of the aircraft structure. The data-driven digital twin enables the aircraft to dynamically replan a safe mission in response to structural damage or degradation.
Kapteyn, M., Knezevic, D. and Willcox, K. In proceedings of 2020 AIAA Scitech Forum & Exhibition, Orlando, FL, January 2020.
This work develops a methodology for creating and updating data-driven physics-based digital twins, and demonstrates the approach through the development of a structural digital twin for a 12ft wingspan unmanned aerial vehicle. The digital twin is built from a library of component-based reduced-order models that are derived from high-fidelity finite element simulations of the vehicle in a range of pristine and damaged states. In contrast with traditional monolithic techniques for model reduction, the component-based approach scales efficiently to large complex systems, and provides a flexible and expressive framework for rapid model adaptation—both critical features in the digital twin context. The digital twin is deployed and updated using interpretable machine learning. Specifically, we use optimal trees—a recently developed scalable machine learning method—to train an interpretable data-driven classifier. In operation, the classifier takes as input vehicle sensor data, and then infers which physics-based reduced models in the model library are the best candidates to compose an updated digital twin. In our example use case, the data-driven digital twin enables the aircraft to dynamically replan a safe mission in response to structural damage or degradation.
Singh, V. and Willcox, K., AIAA Journal, Vol. 55, No. 8, pp. 2727-2738, 2017.
This paper presents methodology to enable path planning for an unmanned aerial vehicle that uses dynamic data-driven flight capability estimation. The main contribution of the work is a general mathematical approach that leverages offline high-fidelity physics-based modeling together with onboard sensor measurements to achieve dynamic path planning. The mathematical framework, expressed as a constrained partially observable Markov decision process, accounts for vehicle capability constraints and is robust to modeling error and disturbances in both the vehicle process and measurement models. Vehicle capability constraints are incorporated using probabilistic support vector machine surrogates of high-fidelity physics-based models that adequately capture the richness of the vehicle dynamics. Sensor measurements are treated in a general manner and can include combinations of multiple modalities such as that through global positioning system signals, inertial mass unit outputs, and structural strain data of the airframe. Results are presented for a simulated three-dimensional environment and point-mass airplane model. The vehicle can dynamically adjust its trajectory according to the observations it receives about its current state of health, thereby retaining a high probability of survival and mission success.
Lecerf, M., Allaire, D. and Willcox, K. AIAA Journal , Vol. 53, No. 10, pp. 3073-3087, October 2015. (An earlier version of this work appeared in AIAA Paper 2014-1175, January 2014.)
This paper presents a data-driven approach for the online updating of the flight envelope of an unmanned aerial vehicle subjected to structural degradation. The main contribution of the work is a general methodology that leverages both physics-based modeling and data to decompose tasks into two phases: expensive offline simulations to build an efficient characterization of the problem and rapid data-driven classification to support online decision making. In the approach, physics-based models at the wing and vehicle level run offline to generate libraries of information covering a range of damage scenarios. These libraries are queried online to estimate vehicle capability states. The state estimation and associated quantification of uncertainty are achieved by Bayesian classification using sensed strain data. The methodology is demonstrated on a conceptual unmanned aerial vehicle executing a pullup maneuver, in which the vehicle flight envelope is updated dynamically with onboard sensor information. During vehicle operation, the maximum maneuvering load factor is estimated using structural strain sensor measurements combined with physics-based information from precomputed damage scenarios that consider structural weakness. Compared to a baseline case that uses a static as-designed flight envelope, the self-aware vehicle achieves both an increase in probability of executing a successful maneuver and an increase in overall usage of the vehicle capability.